
Mahdi Taheri
I am a Postdoctoral Scholar at the Graduate Aerospace Laboratories of the California Institute of Technology (GALCIT), working with Prof. Fred Y. Hadaegh and Prof. Soon-Jo Chung. I received my Ph.D. in Electrical and Computer Engineering from Concordia University, where I worked with Prof. Kash Khorasani. My research focuses on learning-enabled resilient autonomy for safety-critical cyber-physical systems (CPS), with emphasis on fault-tolerant control, cyberattack detection, and robustness under actuator, sensor, and perception system faults as well as adversarial cyberattacks.
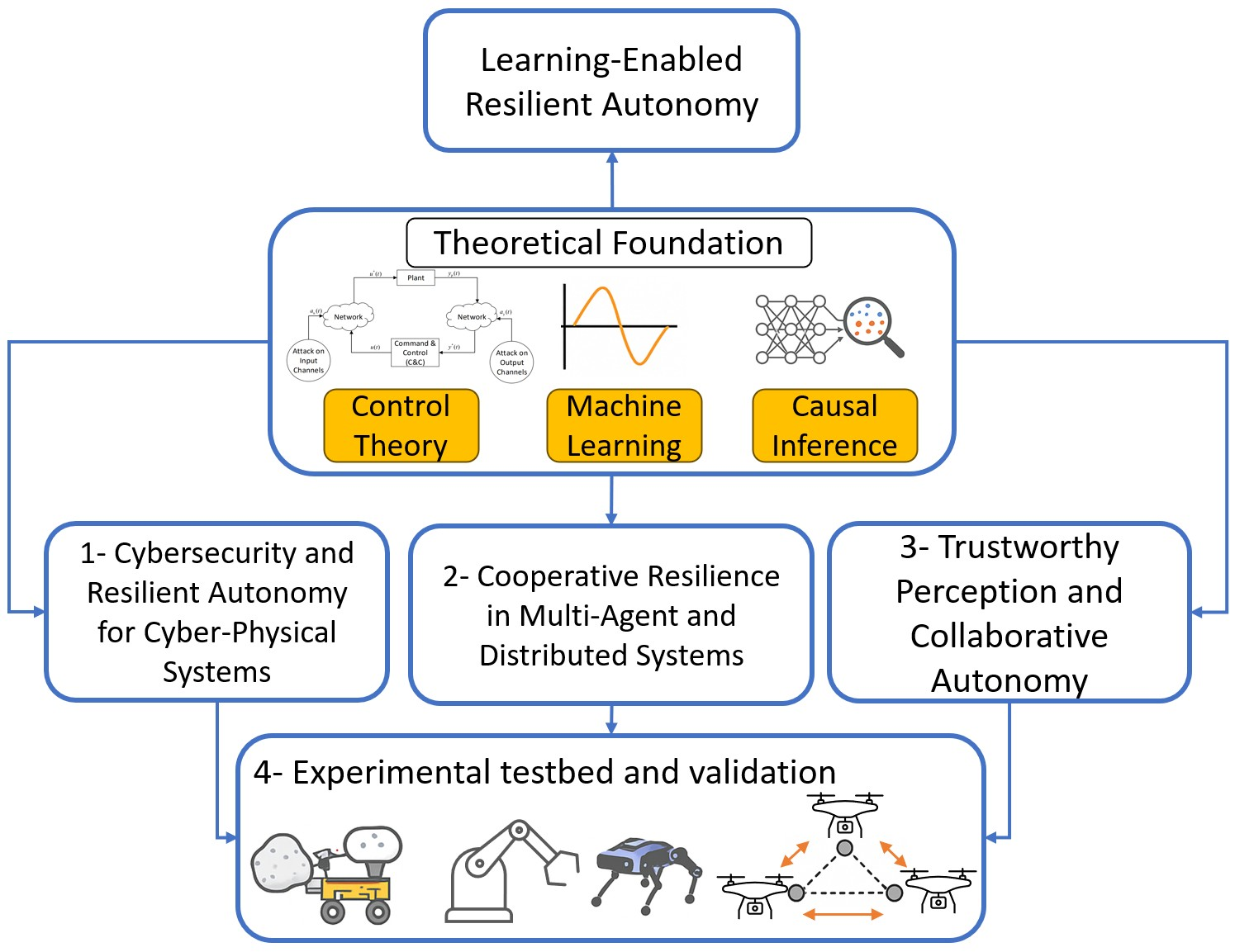
My work integrates nonlinear control theory, online learning with formal guarantees, and causal inference to enable provably safe autonomy for autonomous systems. I am particularly interested in developing principled frameworks that bridge classical control theory and machine learning to enable reliable cyberattack and fault detection, identification, and recovery (FDIR) with formal guarantees of stability and performance. My research is validated through high-fidelity simulation and experimental testbeds in aerospace and robotics.
Latest Work
A central challenge in resilient autonomy arises when control decisions depend on perception-based state estimates. In such settings, estimation errors, perception system errors, and sensor faults propagate directly into the feedback loop, fundamentally coupling perception, estimation, and control. This motivates the need for control architectures that remain stable and reliable under perception uncertainty and sensor faults. We have developed a counterfactual reasoning framework to detect faults and algorithmic errors in perception systems and to identify their root causes.